






MAJ 21 Avril 2017
![]()

|
Projet interdisciplinaire Math/techno : Piloter un fauteuil roulant avec moteurs. |
|---|
|
La situation déclenchante : Comment adapter un fauteuil roulant pour des personnes handicapées n'ayant pas l'usage des bras pour avancer le fauteuil ? |
|
Objectifs pédagogiques ; lien avec les programmes : programmation de l'utilisation d'un joystick pour faire avancer un fauteuil/robot. |
|
Quelles compétences du socle commun ? Domaine 1 : les langages pour penser et communiquer. Domaine 2 : des méthodes et des outils pour apprendre. Domaine 4 : les systèmes naturels et les systèmes techniques. |
|
Quelles compétences spécifiques à chaque discipline ? mathématiques : chercher, modéliser, représenter, raisonner, communiquer technologie : écrire, mettre au point et exécuter un programme. |
|
Lien avec les EPI : le thème ? Sciences, technologie et Société |
|
Niveau préférable dans le cycle 4 : 4ème |
|
Quels logiciels utilisés : scratch en mathématiques, mblock en technologie |
|
Description de chaque séance : dans quel cours Maths ou techno ? que font les élèves ? Une revue de projet est mis en place par l'intermédiaire d'Elyco. Les commentaires sont obligatoires dans le pogramme pour une meilleure compréhension |
Déroulement des activités et des séances. Voir organisation dans le détail.
|
Séquence et séance |
Matière / Activité |
Quest ce quon va faire ? |
Que devenons nous retenir ? |
|
|
|
Technologie et mathématiques 1h30 |
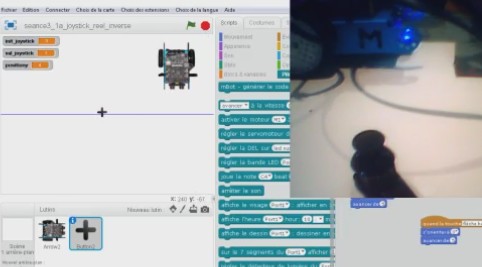
on doit trouver le mot commun à toutes les images. On a vu comment fonctionnait le joystick et le potentiomètre |
|
Le potentiomètre varie de 0 à 1000 alors que lécran scratch varie en horizontal de -240 à + 240 |
|
|
Mathématiques 2H30
|
On va réaliser un jeu de pluie avec un verre qui récupère des gouttes. Le verre se déplace de 0 à 1000 sur laxe horizontal grâce aux flèches du clavier.
|
|
Utiliser correctement les opérateurs pour calculer une valeur de sortie respectant des paramètres d'entrée et de sortie avec le calcul : multiplication, division et soustraction.
|
|
|
Technologie 1h30
|
On doit piloter le verre dabord avec un potentiomètre puis avec le joystick.
|
|
Je peux récupérer les informations du joystick grâce à 2 informations, le déplacement en x et le déplacement en y.
|
|
Mathématiques 1h10 |
On doit faire bouger dans un sens ou l'autre, un lutin robot en fonction de la position du curseur par rapport à un axe horizontal. |
|
Ce programme sera utilisé en techno pour lappliquer avec le joystick et le robot. Il faut expliquer son programme avec des commentaires. |
|
|
|
Technologie 1h30
|
On doit utiliser le programme pour piloter le robot avec le joystick et le faire bouger.
|
|
Utilisation de variables pour stocker les informations de position du joystick pour faire avancer le robot
|
|
|
Mathématiques 20 min |
Je dois trouver une méthode mathématique pour gérer les différentes valeurs des joysticks et des robots qui sont différents à chaque fois. |
|
Prévoir une méthode pour gérer la valeur du joystick au repos qui peut changer. Utiliser des variables pour l'initialisation. |
|
|
Technologie 1h30
|
On doit utiliser ce que jai appris en math pour réaliser un programme qui sadapte à tous les différents matériels.
|
|
On doit utiliser des variables dans le programme pour stocker des informations nécessaires. On utilise des sous programmes pour réaliser des actions. |
|
|
Mathématiques 1h
|
On doit réaliser un programme qui fait varier la vitesse du lutin robot en fonction de la position du joystick. |
|
Une variable permet de stocker une valeur qui peut changer ou varier. Utiliser des tests et des scripts de comparaisons (si alors sinon, < , > , ET).
|
|
|
Technologie 1h30 |
On doit réaliser plusieurs programmes pour faire varier la vitesse du robot et aussi le faire tourner en fonction de la position du joystick. |
|
On peut faire bouger le robot de façon proportionnelle grâce aux variables. |
|
BILAN |
|
Mblock est un logiciel qui permet de piloter des cartes électroniques ou des robots. On peut programmer les actions. Il faut toujours une partie initialisation dans un programme. Des variables permettent de stocker des informations. Il faut toujours faire des commentaires dans un programme pour que dautres le comprennent. |
|
|








Copyright (c) 2017 Technologie mermoz. Tous droits réservés.